Journal Papers
Indoor Infrastructure Maintenance Framework Using Networked Sensors, Robots, and Augmented Reality Human Interface
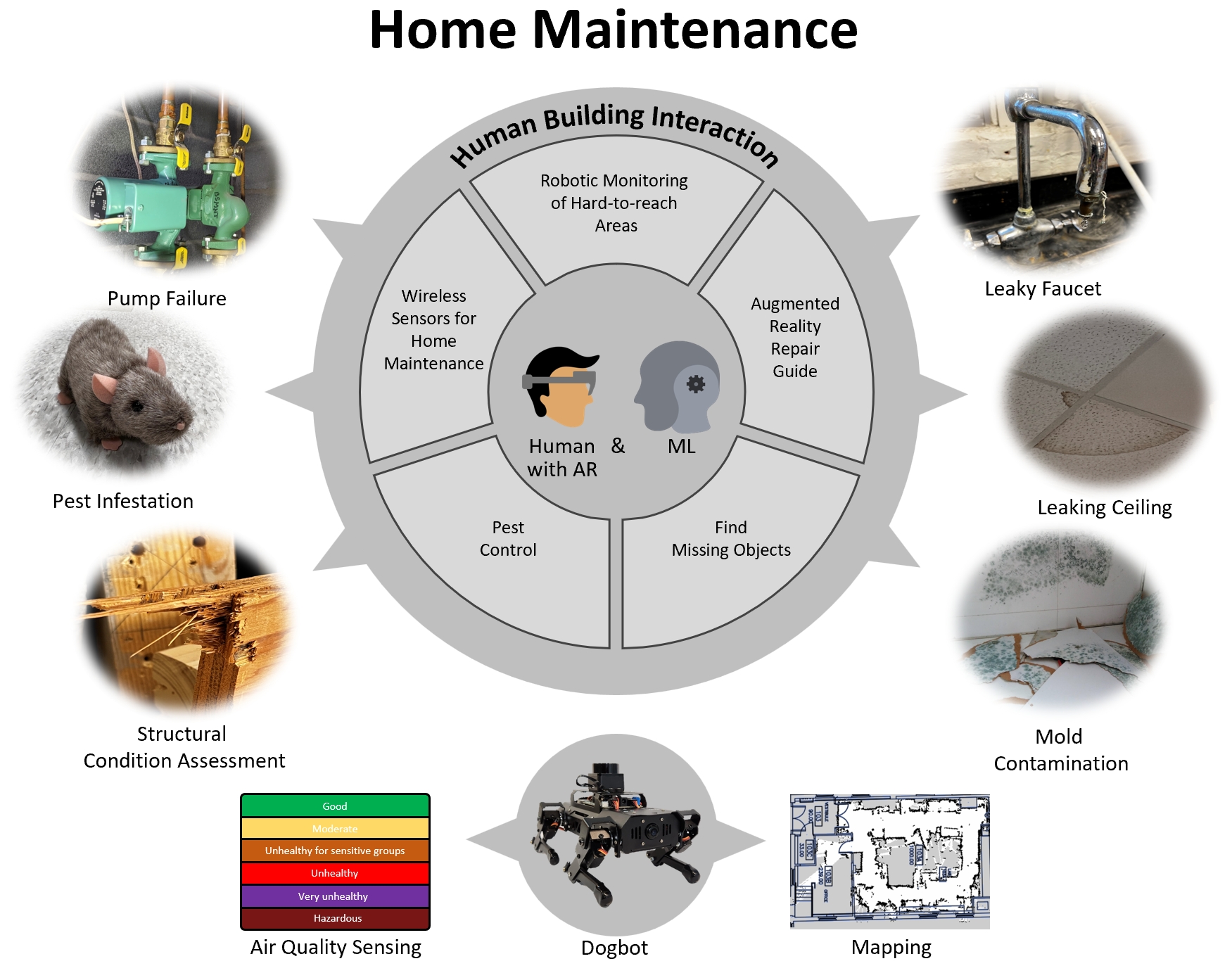
Sensing and cognition by homeowners and technicians for home maintenance are prime examples of human–building interaction. Damage, decay, and pest infestation present signals that humans interpret and then act upon to remedy and mitigate. The maintenance cognition process has direct effects on sustainability and economic vitality, as well as the health and well-being of building occupants. While home maintenance practices date back to antiquity, they readily submit to augmentation and improvement with modern technologies. This paper describes the use of networked smart technologies embedded with machine learning (ML) and presented in electronic formats to better inform homeowners and occupants about safety and maintenance issues, as well as recommend courses of remedial action. The demonstrated technologies include robotic sensing in confined areas, LiDAR scans of structural shape and deformation, moisture and gas sensing, water leak detection, network embedded ML, and augmented reality interfaces with multi-user teaming capabilities. The sensor information passes through a private local dynamic network to processors with neural network pattern recognition capabilities to abstract the information, which then feeds to humans through augmented reality and conventional smart device interfaces. This networked sensor system serves as a testbed and demonstrator for home maintenance technologies, for what can be termed Home Maintenance 4.0.
Future Internet, MPDI · May 15, 2024
MARSBot: A Bristle-Bot Microrobot with Augmented Reality Steering Control for Wireless Structural Health Monitoring
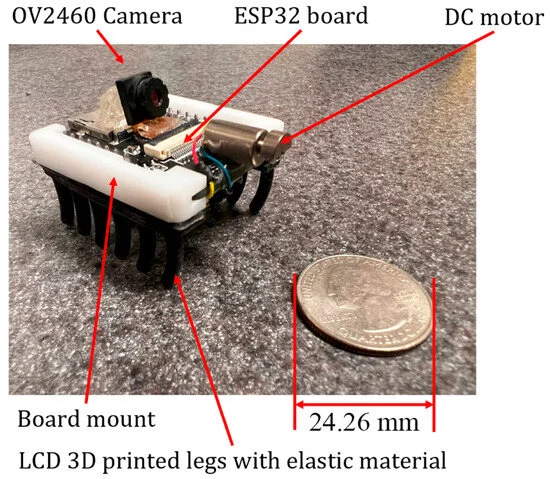
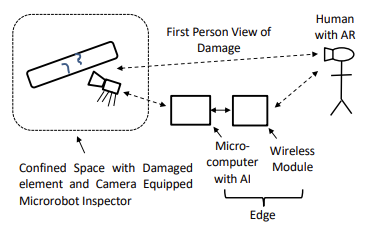
Microrobots are effective for monitoring infrastructure in narrow spaces. However, they have limited computing power, and most of them are not wireless and stable enough for accessing infrastructure in difficult-to-reach areas. In this paper, we describe the fabrication of a microrobot with bristle-bot locomotion using a novel centrifugal yaw-steering control scheme. The microrobot operates in a network consisting of an augmented reality headset and an access point to monitor infrastructures using augmented reality (AR) haptic controllers for human–robot collaboration. For the development of the microrobot, the dynamics of bristle-bots in several conditions were studied, and multiple additive manufacturing processes were investigated to develop the most suitable prototype for structural health monitoring. Using the proposed network, visual data are sent in real time to a hub connected to an AR headset upon request, which can be utilized by the operator to monitor and make decisions in the field. This allows the operators wearing an AR headset to inspect the exterior of a structure with their eyes, while controlling the surveying robot to monitor the interior side of the structure.
Micromachines, MPDI · Jan 29, 2024
Structural Health Monitoring with Robot and Augmented Reality Teams
Mobile robots can access regions and collect data in structural locations not easily reached by humans. This includes confined spaces, such as inside walls, and underground pipes; and remote spaces, such as the underside of bridge decks. Robot access provides the opportunity to sense in these difficult to access spaces with robot mounted sensors, i.e. cameras and lidars, and with the robot placing and servicing standalone sensors. Teams of robots, sensors and AR-equipped humans have the potential to provide rapid and more comprehensive structural assessments. This paper presents results of studies using small robots to explore and collect structural condition data from remote and confined spaces including in walls, culverts, and bridge deck undersides. The presentation also covers system and network architecture, methods for automating data processing with localized and edge-based processors, the use of augmented reality (AR) human interfaces and discusses key technical challenges and possible solutions.
STRUCTURAL HEALTH MONITORING 2023, DEStech Publications Inc. Sep 14, 2023
Recent Advances in the Application of Piezoelectric Materials in Microrobotic Systems
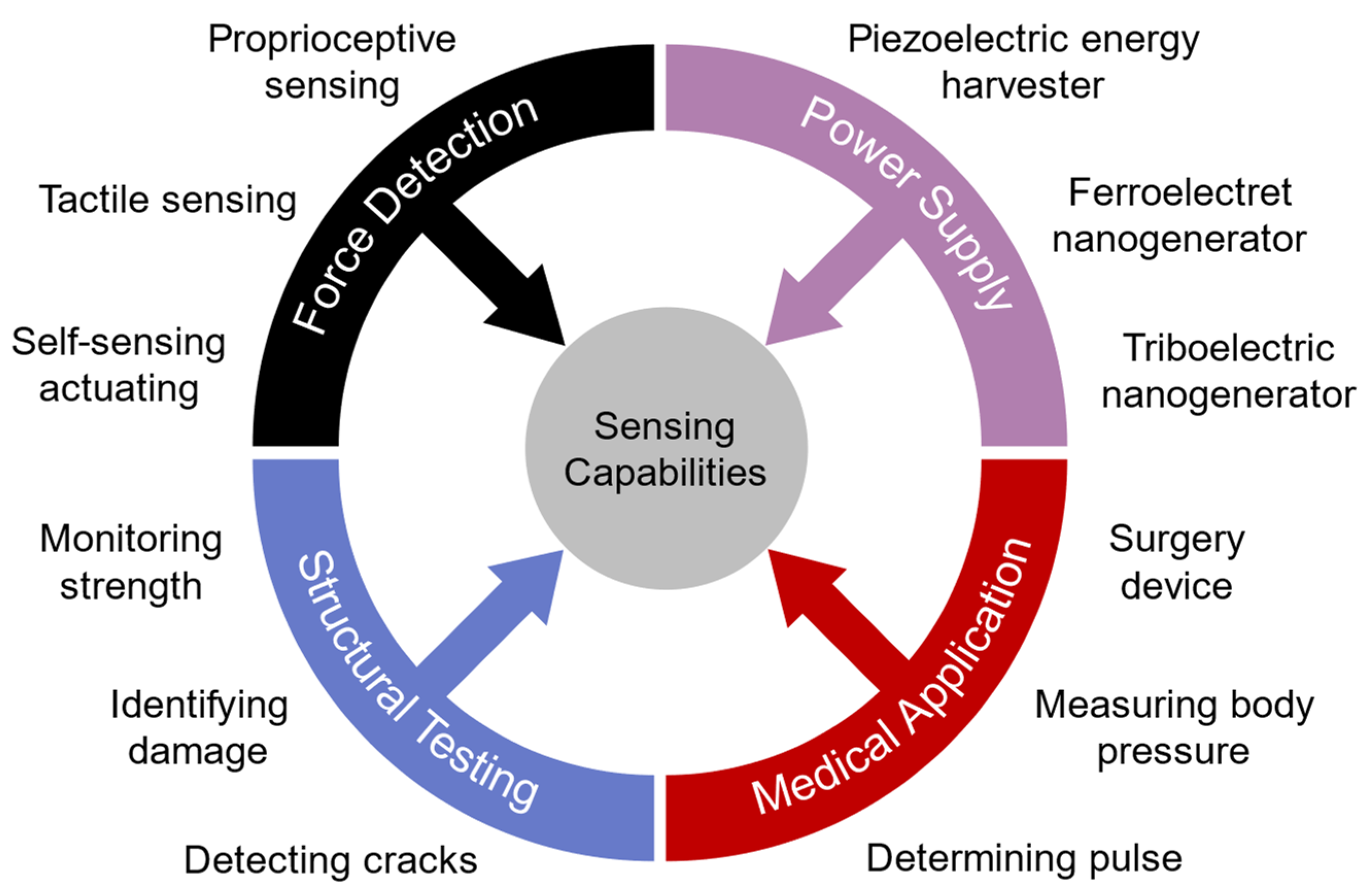
Recent advances in precision manufacturing technology and a thorough understanding of the properties of piezoelectric materials have made it possible for researchers to develop innovative microrobotic systems, which draw more attention to the challenges of utilizing microrobots in areas that are inaccessible to ordinary robots. This review paper provides an overview of the recent advances in the application of piezoelectric materials in microrobots. The challenges of microrobots in the direction of autonomy are categorized into four sections: mechanisms, power, sensing, and control. In each section, innovative research ideas are presented to inspire researchers in their prospective microrobot designs according to specific applications. Novel mechanisms for the mobility of piezoelectric microrobots are reviewed and described. Additionally, as the piezoelectric micro-actuators require high-voltage electronics and onboard power supplies, we review ways of energy harvesting technology and lightweight micro-sensing mechanisms that contain piezoelectric devices to provide feedback, facilitating the use of control strategies to achieve the autonomous untethered movement of microrobots.
Micromachines, MPDI · Aug 29, 2022
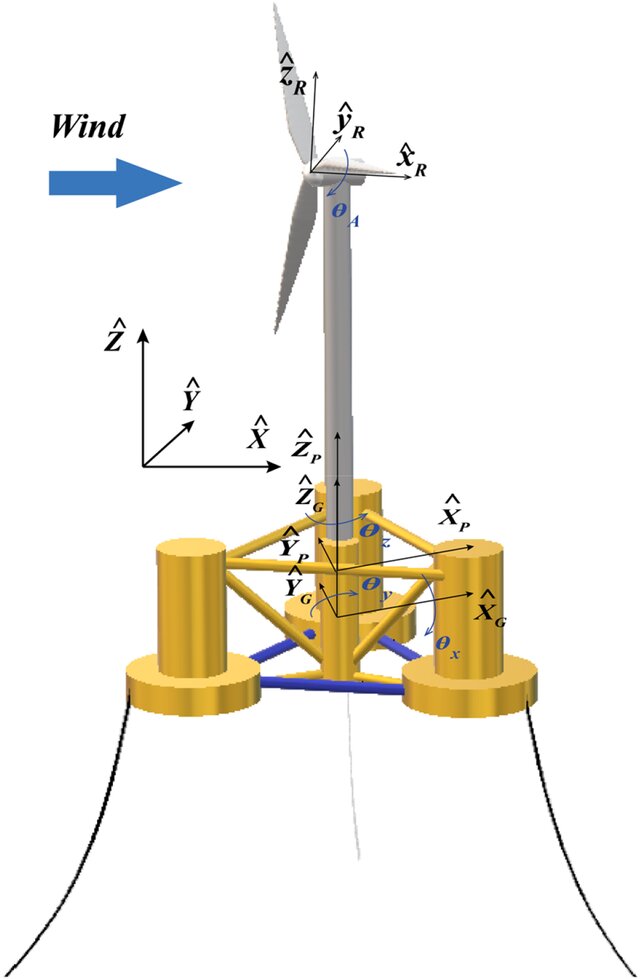
Semi-active vibration control of a semi-submersible offshore wind turbine using a tuned liquid multi-column damper
In this paper, a control system is proposed for the vibration suppression of a semi-submersible offshore wind turbine equipped with a tuned liquid multi-column damper (TLMCD). The TLMCD consists of three columns of liquid integrated into the superstructure of the semi-submersible platform. To improve the vibration suppression performance of the TLMCD, unlike previous works, the TLMCD is operated in a semi-active mode by introducing three flow control valves that allow liquid to transfer between columns. Since the rotor dynamics may greatly affect the platform vibrations, it has been included in the derived nonlinear dynamic model. In the proposed control loop, the closed-loop performance objectives of platform stabilization and rotor speed regulation are accomplished by two distinct controllers. For the platform stabilization purpose, three controller design methods of displacement-based ground-hook, velocity-based ground-hook, and bang–bang are investigated. Meanwhile, to achieve the rated rotor speed, two methods of the H∞ and gain-scheduling control schemes are attempted. The closed-loop performance is investigated through numerical simulations. Realistic wind profiles along with a wave disturbance are implemented in the numerical simulations. The results show that the gain-scheduling control scheme for the rotor speed regulation and the velocity-based ground-hook method for the platform stabilization outperform other methods. Furthermore, to study the effect of the design parameters of the TLMCD on the closed-loop performance, several cases with different values of the design parameters are examined and compared.
Journal of Ocean Engineering and Marine Energy, Springer · Sep 4, 2020
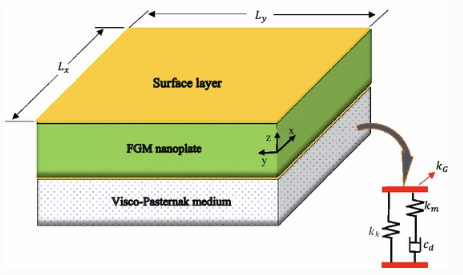
Surface effect on the biaxial buckling and free vibration of FGM nanoplate embedded in visco-Pasternak standard linear solid-type of foundation
In this study, nonlocal elasticity theory in conjunction with Gurtin–Murdoch elasticity theory is employed to investigate biaxial buckling and free vibration behavior of nanoplate made of functionally graded material (FGM) and resting on a visco-Pasternak standard linear solid-type of the foundation. The material characteristics of simply supported FGM nanoplates are assumed to be varied continuously as a power law function of the plate thickness. Hamilton’s principle is implemented to derive the non-classical governing equations of motion and related boundary conditions, which analytically solved to obtain the explicit closed-form expression for complex natural frequencies and buckling loads. Finally, attention is focused on considering the influences of various parameters on variation of damped natural frequency and buckling load ratio such as nonlocal parameter, surface effects, geometric parameters, power law index and properties of visco-Pasternak foundation and it is clearly demonstrated that these factors highly affect on vibration and buckling behavior.
Meccanica, Springer · Apr 1, 2017
Conference Papers
Human Interface for Indoor Infrastructure Maintenance using Networked Sensors, Robots, and Augmented Reality
This presentation describes a framework for human building interaction for home and interior structural maintenance through the use of smart technologies including networked sensors, robots, machine learning and augmented reality. Sensing and assessment for repair and maintenance of indoor infrastructure requires direct interaction between buildings and humans. Items of concern are leaks, structural issues, mechanical systems failures, vermin infestation, etc. While building assessment for maintenance is a human activity that dates back to antiquity, much of it normally requires skill and training that is beyond the grasp of the typical homeowner. Furthermore, many items of distress lie hidden beneath walls and floors. It may be possible to alleviate these sensing, assessment, and maintenance challenges through the use of advanced technologies that collect data, transmit it through networks, and reformulate in manners best understood by humans. Demonstrated techniques include the use of small robots to enter and sense in confined areas, mobile robot mounted lidar scans of structural shapes combined with assessment of deformed and misshapen conditions, moisture and gas sensing, water leak detection, network embedded machine learning including links to recommended repair options and presented to humans in augmented reality interfaces. This networked sensor system is a testbed and demonstrator for home maintenance technologies, providing a framework for Home Maintenance 4.0.
ASCE Engineering Mechanics Institute Conference and Probabilistic Mechanics & Reliability Conference (EMI/PMC 2024) · May 30, 2024
Monitoring Infrastructure using Augmented Reality in a Network of Microrobots with Visual Data Analysis
Despite advancements in sensing technology for smart infrastructure, monitoring dynamic components such as pipelines, industrial equipment, and transportation systems remains challenging. In this paper, a network of micro-robots equipped with Wi-Fi-compatible cameras is deployed to conduct visual structure inspection in poorly accessible environments. To achieve swarm infrastructure monitoring, ESP32-CAM modules mounted onto HEXBUG nano® V2 bristlebots are deployed to survey their intended area as a mesh network. The camera modules transmit live video to a nearby supervisor robot, which positions the HEXBUGs, processes the visual data, and broadcasts it through a Wi-Fi network. Machine learning algorithms are applied to the raw visual data to differentiate between objects. A Microsoft HoloLens 2 unit, connected to the HEXBUG network via Wi-Fi, scans for QR codes embedded in the surrounding environment and receives broadcast data, allowing a site operator to view processed video streams in first-person and in real-time.
ASCE Engineering Mechanics Institute 2023 Conference · Jun 9, 2023
Control of a Semi-submersible Offshore Wind Turbine with a Tuned Liquid Column Damper
This paper proposes a new type of Tuned Liquid Column Damper (TLCD) for vibration suppression of a semi-submersible offshore wind turbine. The proposed mechanism consists of three columns of liquid equipped with three valves that allow the liquid to transfer between columns. The nonlinear dynamic model of the offshore wind turbine and the TLCD is derived and validated. The model is linearized around equilibrium point and a mixed 𝐻∞ – Velocity Based Groundhook (VBG) controller is designed to suppress vibrations of the platform and achieve the rated rotor speed. The performance of the controllers is investigated through numerical simulations.
The 6th Annual Clean Energy Conference (ACEC 2019) · Feb 27, 2019