Dynamic Modeling and Control of a 6 DOF Serial Manipulator Tracking Trajectories Using Sliding Mode and PID Control Methods.
A 6-DOF serial industrial manipulator introduced in this paper. Kinematics problem solved by a closed form solution and a full dynamic model derived using the Lagrange formulation. joint mode trajectory planning is used to determine the desired trajectory and PID control design is used on the model to track it. Finally, to study the effectiveness of PID and sliding mode control design a sinusoidal desired trajectory was given to the system. The both proposed controller was effective enough to make the system track trajectories but sliding mode controller shows better results in the terms of performance.
Prototyping a low-cost mobility and rehabilitation robot for paraplegic patients with any level of paralysis

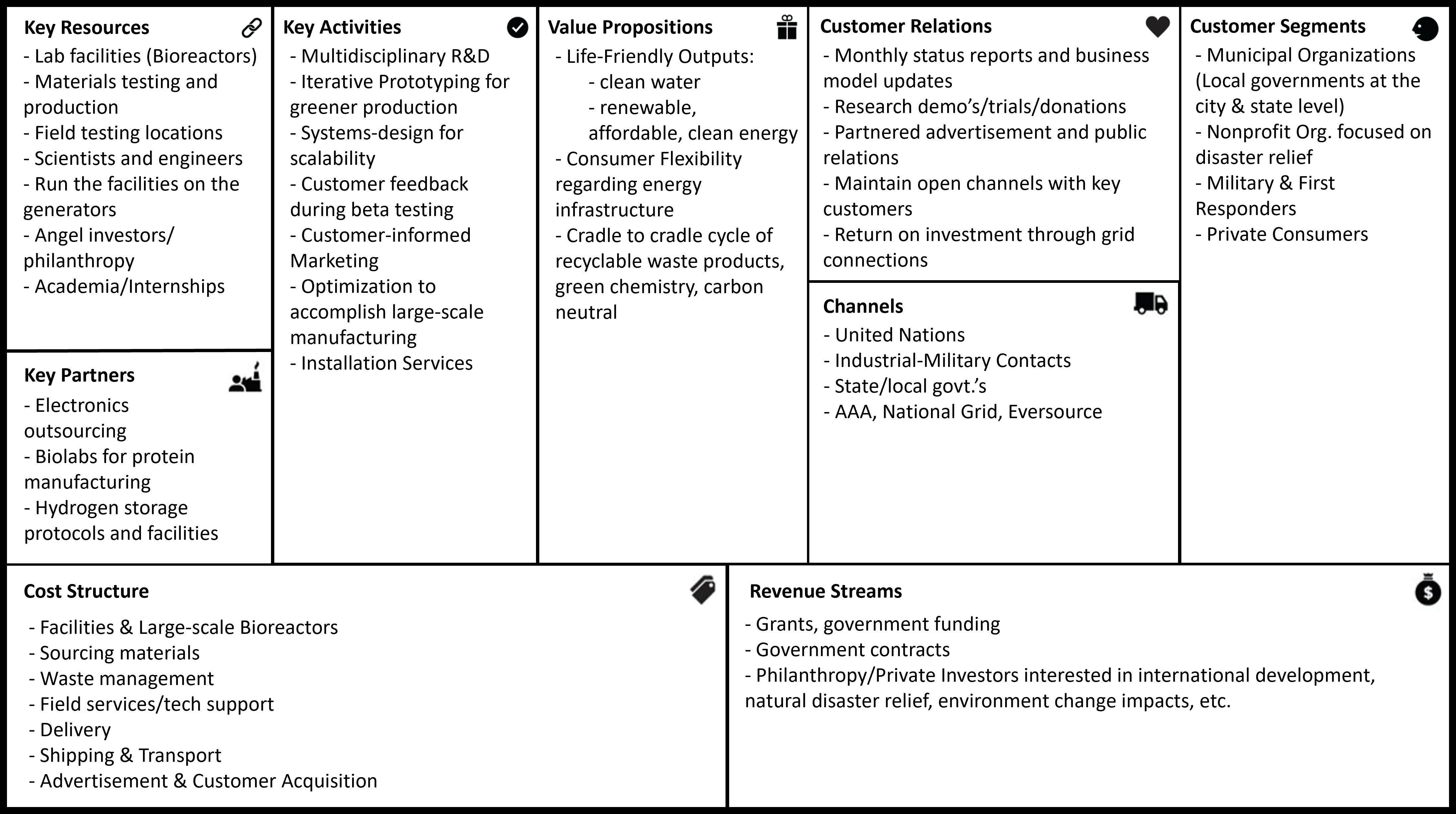
Biomimicry Business Pitch and Business Model Canvas for a Biology-based Solution to Generate Electricity and Clean Potable Water
- Investigation of Biomimetic Aquaporin Membrane Applications in Sustainable Freshwater Production
- Prediction of Photovoltaic Thermal System’s Behavior Using Machine Learning Algorithms
Investigation of How the James Webb Space Telescope’s Project Addressed the Tradeoffs among Cost, Scope, and Schedule
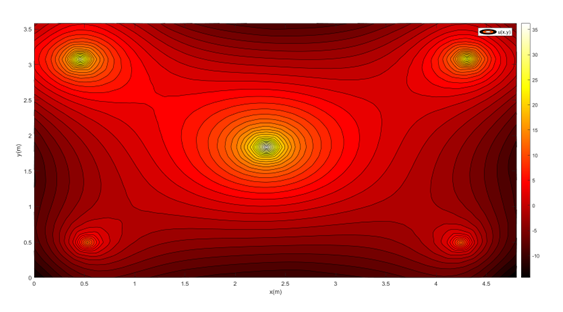
Numerical Modeling of the Heat Flow in the Room under Various Heating Scenarios and Determining the amount of Electricity
We have five heaters for heating the porch, and we can adjust their positions and heating power to maximize energy efficiency and heating. During the trial and error optimization, I discovered that by placing them very close to the corner, we might lose energy and not get enough heat in the room. Moving them too close to the center, on the other hand, may result in coverage loss. So I experimented with various options, moving from the corners to the center as long as we reached the heat of the center heater and were not too close to it.
In terms of optimizing heating power, I noticed that the problem is symmetrical in the x direction, so we can categorize them as top, middle, and bottom. I discovered through trial and error that we get the best results by putting more power in the middle because it is a strategic location, and because we are surrounded by the house from the bottom and the outside from the top, it makes sense to put more power in the top heaters than the bottom heaters. By comparing different values, I discovered that we can heat the room effectively for as little as $1.2154 per hour.
Project Manager for Creating a Video that Demonstrates a Do-it-Yourself (DIY) Engineering Project for Grade 9-12 Students
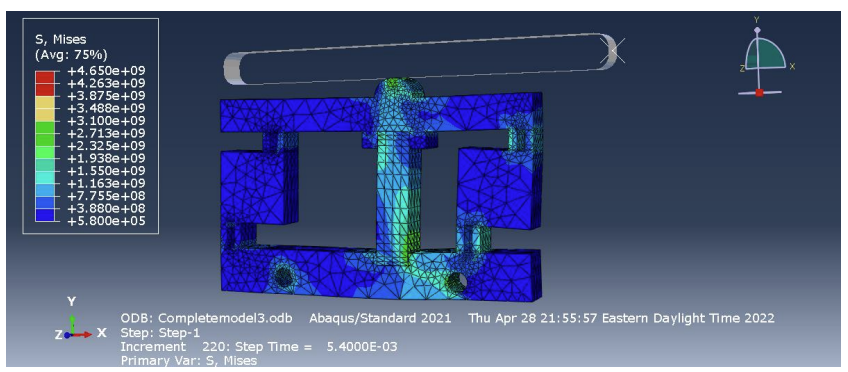
Simulation of Sensing Capabilities of Microrobots by using a Piezoelectric-based Mechanism in ABAQUS FEA Software
Insect-inspired microrobots gained more attention as the fabrication technologies advanced, and the next step that they require toward an insect-like autonomous movement is sensing capabilities. The novel light-weighted sensing devices contain piezoelectric methods to provide feedback for facilitating the use of control strategies in order to achieve autonomous untethered movement of microrobots. In this project, I used a novel piezoelectric mechanism that used to create the movement using the electrical potential, and now I used it in the opposite direction to generate the electrical potential using a displacement. By using this method, we can find a relationship between the displacement and the electrical potential to give microrobots sensing capabilities. For this purpose, I used ABAQUS software to model the mechanism in three parts which are the Slider, Flexure, and Piezostack. The slider receives the displacement and through parasitic motion with the Flexure, imposes it on the Piezostack. Then, by assigning the piezoelectric properties to the Piezostack, we can determine the electrical potential using the strain imposed on it.
- Designing an Adaptive Controller for Plants with Relative Degree Larger than One.
- Dynamic Modeling and Simulation of a 4 DOF TLP Offshore Wind Turbine Using Newton and Lagrange Methods.
- H-infinity Control of a 4 DOF TLP Offshore Wind Turbine Using Blade Pitch Angle and Generator Torque to Regulate Rotor speed and Pitch angle.